-
-
点焊DressPack
- 点焊专用或点焊结合物料搬运DressPack系列可满足不同生产需求。
- 通用特性:
- - 解决方案文档齐全,提供培训材料,电路图和CAD模型
- - 便于维护,提供备件支持
- - 支持并行信号及通用现场总线通信
- - 支持气动或伺服焊枪
- - 支持AC或MFDC焊接
-
-
-
-
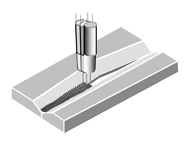
WeldGuide IV
- WeldGuide IV是市面上最强大的一款基于电弧的机器人焊缝跟踪系统。 为了进行精确焊接, 不仅要观看电弧, 而且 还要听取焊接过程的声音。 在开发基于电弧的跟踪传感器WeldGuide时, 我们始终牢记这一点。 该技术采用两路传 感器输入: 焊接电流和电弧电压。 测量数据与机器人沿焊缝迂回行进的模式同步, 并向机器人控制器提供纵向和横 向校正信号, 以确保沿焊缝的焊弧位置一致。 WeldGuide传感器每种对焊弧进行25,000次实值采样, 其速度最高可 达传统跟踪技术的25倍。
-
-
-

-
IRB 6660RX (7 轴机器人)
主要应用
冲压自动化 荷重 (kg) 75/50 上下料 工作范围 (m) 3.10 + 1.3/1.45 物料搬运 第7轴( 回转) 补偿第6-7轴: 1.30/1.45 m 高度: 127 mm -
-
-

-
IRB 6660FX (7 轴机器人)
主要应用
冲压自动化 荷重 (kg) 40 上下料 工作范围 (m) 3.10 + 1.40 物料搬运 第7轴( 回转) 行程: ± 1.40 m 高度: 130 mm 最大速度: 5 m 最大加速度: 20 (m/s2) -
-
-

-
焊枪
- 我们提供品种齐全的主流品牌焊枪。 针对Esab AristoMig 5000i焊机, 我们提供气冷和水冷式Binzel ABIROB A和 ABIROB W焊枪套件。 针对RPC焊接, 我们为IRB 1520ID配套Binzel ABIROB A焊枪套件( 气冷), 为IRB 1410配 套Esab PSF315焊枪套件( 气冷)。
-
-
-

-
IRB 760 多轴双机器人
主要应用
冲压自动化 荷重 (kg) 150( 十字臂、 工装和零件) 物料搬运 工作范围 (m) 3.10 + 1.75 -
-
-

-
TSC焊枪服务中心2013
- 我们的焊枪服务中心是以机械方式清除焊枪焊接飞溅物的集成式系统。 由机器人控制系统控制和监视清洁操作, 确 保在焊枪被夹到正确位置前不开启。 这样可阻止振动或冲击传到机器人, 并将焊枪每次锁定在相同位置, 以提高清 洁精度, 减少对被清洁部分的磨损。
-
-
-

-
IRB 7600RX (7 轴机器人)
主要应用
冲压自动化 荷重 (kg) 85/80 上下料 工作范围 (m) 3.50 + 1.30/1.45 物料搬运 第7轴( 回转) 补偿第6-7轴: 1.30/1.45 m 高度: 127 mm -
-
-

-
IRB 7600FX (7轴机器人)
主要应用
冲压自动化 荷重 (kg) 100 上下料 工作范围 (m) 3.10 + 1.75 物料搬运 第7轴( 回转) 行程: ± 1.75 m 高度: 130 mm 最大速度: 5 m 最大加速度: 18 (m/s2) -
-
-

-
Bull’s Eye( 牛眼)
- 可进行全自动工具中心点校准, 确保机器人工位在利用率、 焊接质量与生产效率全面达到最优化。
- 通过置身定制的预设程序, 可在生产过程中完成全自动工具中心点校准, 停机时间几乎为零。
-
-
-

-
Esab AristoMig 5000i
电压范围 (V) 8-60 电流范围 (A) 16-500 MIG/MAG允许负载 60%占空比: 500 A/40 V; 100%占空比: 400A/36 V 工艺方法MIG/MAG 短电弧、 喷射电弧、 快速电弧、 脉冲电弧 Esab AristoMig 5000i工艺设备标准套件提供Esab AristoMig集成图形用户界面。 适用于IRB 1600、 IRB 1600ID、 IRB2600和 IRB2600ID。 -
-
-

-
电源RPC S-400
连接电压 (V) 400 (-15%~+20%) 输出电流 (A) 400 (80%占空比) 焊接模式 协同 MIG/MAG ABB RPC S-400工艺设备标准套件提供ABB RPC S集成图形用户界面。 适用于IRB 1410和IRB 1520ID。 仅限于亚洲市场。 -
-
-

-
图形用户界面
- 适用于Fronius、 RPC、 Esab、 Lincoln和Miller电源套件。 简单易用的FlexPendant( 示教器) 图形用户界面为操作员一站式提供编程、 工作站状态监控, 关键质量和生产数 据显示等各项功能。 FlexPendant仅设少量按钮, 界面直观如PC机, 提供多语种支持, 操作员只需经过简单培训, 即可胜任焊接作业管理。 FlexPendant还集成了电源接口, 操作员可全面控制电压、 电流、 速度、 气流等参数。
-
-
-
-
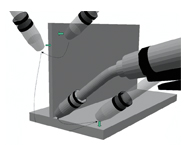
焊缝跟踪系统SmarTac
搜索速度 (mm/s) 20-50( 取决于定位精度要求) 一维单点搜索时间 (s) 2-6( 取决于工件复杂程度) 精度 (mm) +/-0.25( 搜索速度为20mm/s) -
-
-

-
给胶器(单只或成对, 加热或不加热)
总容积 (cm3) 80 155 560 标称流量 (ml/s) 24 37.50 80 峰值流量 (ml/s) 28 44 96 标称流量/峰值压力 (bar) 150 / 250 150 / 250 150 / 250 尺寸* (mm) 170x460x950 180x470x960 200x510x1390 -
-
-

-
泵(单筒或双简, 加热或不加热)
泵筒尺寸 (I) 30 50 200 从动板 ø (mm) 280 355 571 压力比 65:1 65:1 65:1 双行程排量 (cm3) 150 150 150 尺寸* (mm) 1070x700x2350 1070x700x2350 1070x700x2350 -
-
-

-
涂胶器
上胶 SPA470密封 SPA410密封 材料温度调节
1个喷嘴* 3个喷嘴 Peltier 600W** Peltier 800W** 



-
-
-

-
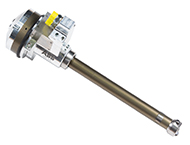
集成力控
- 传统机器人解决方案都是以预先编定的路径与速度实施运行控制, 而ABB集成力控机器人能针对环境变化随时作出 回应, 并根据力传感器的回馈信号调整其程控路径或速度。 以前只能依靠熟练工凭借高超技艺或是采用昂贵的高刚 性自动化设备进行作业, 如今可以通过ABB集成力控机器人实现生产自动化。
-
-
-

-
集成力控
主要应用 容量 传感器165 传感器660 传感器2500 研磨 Fx. Fy 165 Nm 660 N 2500 N 铣削 Fz 495 N 1980 N 6250 N 抛光 Mx, My, Mz 15 Nm 60 Nm 400 Nm 去毛刺 尺寸 装配 高度 (mm) 40 40 62 产品测试 直径 ø (mm) 104 104 168 -
-
-

-
集成视觉系统
- 紧凑型智能摄像头可在RobotStudio®中轻松完成与机器人的互动编程, 满足用户对视觉引导机器人的个性化需求。 视觉系统坚固耐用、 可靠性高, 久经各类工业解决方案的严苛考验。 产品配套提供电缆、 滤镜、 镜头、 机身和软件。
-
-
-

-
力控
- 实现复杂工件表面与边缘的简易程序示教和自动路径生成, 为抛光、 去毛刺和研磨等机加工工序扫清了技术障碍。 相较于传统的机器人位置控制技术, 力控贯穿整个加工过程, 增强工具与工件之间接触力的感知, 保证工件加工质 量。 ABB各机加工专用机器人分别配套不同的力控功能组块。
-
-
-

-
工具系统 TS 2600ID
- IRB 2600ID的工具系统通过机器人上臂布设电缆和软管, 在全面控制DressPack的同时, 还能接近狭窄空间。 由歧 管向所有机械手输送空气、 动力和信号, 同时, 选配的工具更换器适合自动工具更换, 提高了工具系统的灵活性。 这样可减少磨损和撕裂, 不限制机器人的运动, 提高生产率。
荷重能力(kg) 60 最高空气压力(bar) 10 空气接头 G 1/8” 最大电压 (V) 60 最大电流 (A) 3 -
-
-

-
集成式 DressPack - LeanID
- 此类DressPack灵活性强, 可满足各种生产需求, 适用于注重灵活性和可达性的生产环节, 也适合复杂腕部动作较密 集的作业以及对产品转换柔性要求较高的场合。 无需个别调整。
-
-
-

-
外置式( 配备伸缩臂功能)
- 外置式DressPack配有将电缆推离手腕的伸缩臂。 需少量个别调整。
-
-
-

-
外置式
- 外置式DressPack适合对机器人工装仅有基本要求的生产。 需个别调整。
-
-
-
-
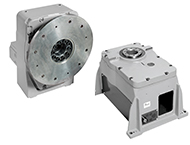
齿轮单元 MTD / MID
产品/MTD 和 MID MTD 250 MTD 500 MTD 750 MTD 2000 MTD 5000 MID 500 MID 1000 最大搬运能力(kg) 300 600 1000 2000 5000 1300 3300 最大连续转矩 (Nm) 350 650 900 3800 9000 1400 3800 最大弯曲力矩(Nm) 650 3300 5000 15000 60000 5000 15000 -
-
-

-
电机单元MU
产品 / MU MU 100 MU 200 MU 300 MU 400 额定转速 (rpm) 3300 5000 5000 4700 最大动态转矩 (Nm) 4.30 14 42.80 50 -
-
-

-
FlexGripper - 夹爪式夹具
可处理产品数 1 单次拾取最大重量 (kg) 50 夹具重量 (kg) 70 最大指间距 (mm) 75 包袋尺寸( 长度x宽度x高度范围) (mm) (300-750)x(300-550)x(120-250) 主要应用 包袋码垛 -
-
-

-
FlexGripper - 夹钳式夹具
可处理产品数 1-2 1-5 单次拾取最大重量 (kg) 40 60 夹具重量 (kg) 45 80 最大指间距 (mm) 单区型 双区型 包袋尺寸( 长度x宽度x高度范围) (mm) (200-650)x(200-500)x(150-330) (200-1200)x(200-500)x(150-330) 主要应用 箱盒码垛
-
-
-

-
FlexGripper – 真空吸盘夹具
可处理产品数 1-5 单次拾取最大重量 (kg) 40 夹具重量 (kg) 75 最大指间距 (mm) 10 包袋尺寸( 长度x宽度x高度范围) (mm) 最大1200x500x300 mm, 最小240x240x100 主要应用 箱盒码垛。 搬运的托盘类型:GMA/AUS/EUR/ISO -
-
-
-
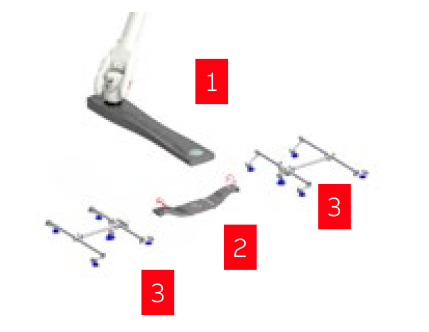
碳纤维工装
ABB模块化工装系统含碳纤维(CF)结构件(1和2)和铝合金部件(3),适用于各种不同零件。
碳纤维吊杆可大幅减小变形、振动及自重,从而提升运行性能,获得最优节拍时间。
碳纤维吊杆(1)延伸了机器人手臂,其长度为1450 mm,最高荷重达100 kg。碳纤维Gondola手臂(2)是6轴和7轴机器人的通用部件,有1000mm和1400 mm两种长度可供选择。
主要应用:冲压自动化、物料搬运
-
-
-
-
DDC 动态传动链( 压机伺服技术)
- DDC在冲压操作时加快压机的开闭频率, 以飞轮储存能量, 从而在有限峰值功率条件下实现新老压机对伺服技术的 充分利用。 该技术提供一个“伺服包” (齿轮电机和传动), 同自动化设备一起集成于同一主控设备中。 DDC生产 线速度可比普通生产线快30%。
- DDC采用再生制动和同步离合技术, 能耗更低。
-
-
-

-
集成式 DressPack - LeanID
- 此类DressPack灵活性强, 可满足各种生产需求, 适用于注重灵活性和可达性的生产环节, 也适合复杂腕部动作较密 集的作业以及对产品转换柔性要求较高的场合。 无需个别调整。
-
-
-

-
外置式( 配备伸缩臂功能)
- 外置式DressPack配有将电缆推离手腕的伸缩臂。 需少量个别调整。
-
-
-

-
点焊控制柜
- 专用点焊控制柜, 包括点焊定时器。
- 控制柜支持多种工艺需求, 例如:
- - AC或MFDC焊接技术
- - 机器人携带式或固定式焊枪
- - 气动或伺服控制焊枪
-
-
-

-
水气单元
- 点焊工艺用全集成水气单元。
- 支持多种工艺需求, 例如:
- - 机器人携带式或固定式焊枪
- - 气动或伺服控制焊枪
-
-
-
-
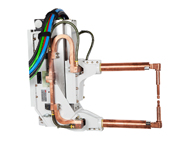
FlexGun IRG X 型焊枪
类型 X型 变压器 MFDC 或 AC 最大行程 (mm) 245 最大压力 (daN) 757 (枪体承受力) 臂长 (mm) 227-600 重量 (kg) 100-150 关键特点 枪体兼容X型和C型 -
-
-

-
FlexGun IRG C 型焊枪
类型 C型 变压器 MFDC 或 AC 最大行程 (mm) 245 最大压力 (daN) 757 (枪体承受力) 臂长 (mm) 0-250 重量 (kg) 100-150 关键特点 枪体兼容X型和C型 -